


Parallel Mine Simulation System
 矿卡无人驾驶
矿卡无人驾驶
进行矿卡车端各功能充分测试验证,其中包括控制模块、感知模块、决策模块、定位模块、规划模块等,增进算法的快速实现、调优
 V2X功能验证
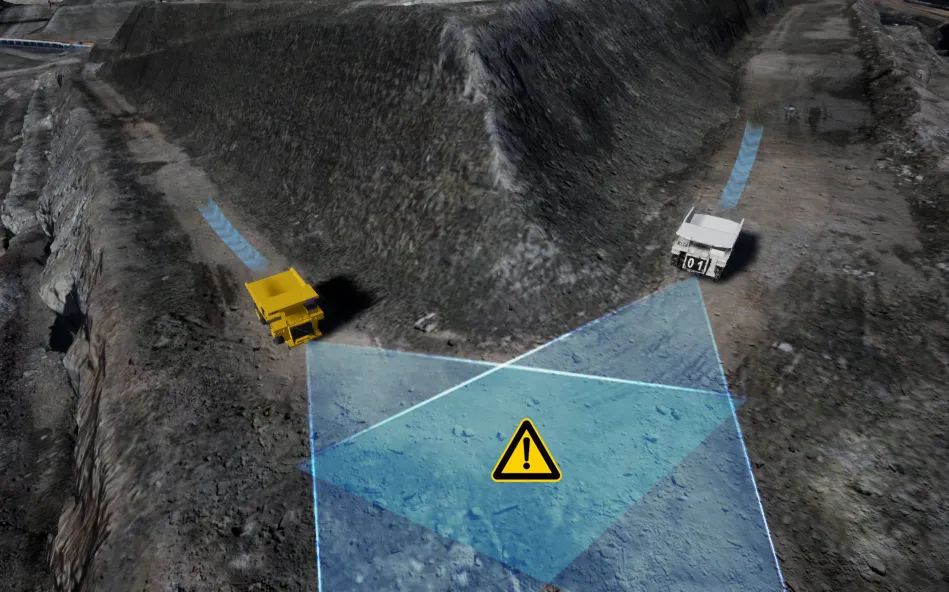
V2X功能验证
进行V2X、防碰撞功能联合测试,包括交叉路口、结构化道路、作业区域等下的跟车、会车功能测试
 数字孪生仿真
数字孪生仿真
通过5G网络通信对数据的高速传输,精准控制虚拟车辆在虚拟环境中与真实车辆在真实环境中保持完全同步,实现真实与虚拟车辆之间的数字孪生效果
 机群作业管理
机群作业管理
进行远超现场数量的多车调度管理测试,高效进行系统测试,寻找最优调度策略,降低安全风险,稳固推进项目落地
 软硬件性能
软硬件性能
结合现场实际情况,搭建1:1对应的虚拟环境,进行硬件、软件的长久、可靠性测试
 挖卡协同作业
挖卡协同作业
实时进行挖卡协同功能测试,包括入场机制、装载模式、出场机制、安全机制等功能

缩短现场调试时间90%

加快算法迭代和收敛速度

提高系统开发效率

节省企业成本支出

提高安全性和可靠性
 微信公众号
微信公众号
 京公网安备 11010802033712号
京公网安备 11010802033712号